BEAM standing for Biology, Electronics, Aesthetics, and Mechanics… and meaning a strata of robotics that uses analogue circuits rather than microcontrollers to do whatever it is that they do. They also seem to mimic various biological critters (in various respects) but remind me more of really simple, single cell creatures arising out of some primordial soup… DNA learning how to walk for the first time.


This one follows light:
from Harolds Beam Bugs and being a proper community-driven type thing, they all come with instructions etc.

One of the things I like about these is that someone’s put together a taxonomy for them:
There are various “-trope” BEAMbots, which attempt to achieve a specific goal. Of the series, the phototropes are the most prevalent, as light-seeking would be the most beneficial behaviour for a solar-powered robot.
- Audiotropes react to sound sources.
- Audiophiles go towards sound sources.
- Audiophobes go away from sound sources.
- Phototropes (“light-seekers”) react to light sources.
- Photophiles (also Photovores) go toward light sources.
- Photophobes go away from light sources.
- Radiotropes react to radio frequency sources.
- Radiophiles go toward RF sources.
- Radiophobes go away from RF sources.
- Thermotropes react to heat sources.
- Thermophiles go toward heat sources.
- Thermophobes go away from heat sources.
BEAMbots have a variety of movements and positioning mechanisms. These include:
- Sitters: Unmoving robots that have a physically passive purpose.
- Beacons: Transmit a signal (usually a navigational blip) for other BEAMbots to use.
- Pummers: Display a “light show”.
- Ornaments: A catch-all name for sitters that are not beacons or pummers.
- Squirmers: Stationary robots that perform an interesting action (usually by moving some sort of limbs or appendages).
- Magbots: Utilize magnetic fields for their mode of animation.
- Flagwavers: Move a display (or “flag”) around at a certain frequency.
- Heads: Pivot and follow some detectable phenomena, such as a light (These are popular in the BEAM community. They can be stand-alone robots, but are more often incorporated into a larger robot.).
- Vibrators: Use a small pager motor with an off-centre weight to shake themselves about.
- Sliders: Robots that move by sliding body parts smoothly along a surface while remaining in contact with it.
- Snakes: Move using a horizontal wave motion.
- Earthworms: Move using a longitudinal wave motion.
- Crawlers: Robots that move using tracks or by rolling the robot’s body with some sort of appendage. The body of the robot is not dragged on the ground.
- Turbots: Roll their entire bodies using their arm(s) or flagella.
- Inchworms: Move part of their bodies ahead, while the rest of the chassis is on the ground.
- Tracked robots: Use tracked wheels, like a tank.
- Jumpers: Robots which propel themselves off the ground as a means of locomotion.
- Vibrobots: Produce an irregular shaking motion moving themselves around a surface.
- Springbots: Move forward by bouncing in one particular direction.
- Rollers: Robots that move by rolling all or part of their body.
- Symets: Driven using a single motor with its shaft touching the ground, and moves in different directions depending on which of several symmetric contact points around the shaft are touching the ground.
- Solarrollers: Solar-powered cars that use a single motor driving one or more wheels; often designed to complete a fairly short, straight and level course in the shortest amount of time.
- Poppers: Use two motors with separate solar engines; rely on differential sensors to achieve a goal.
- Miniballs: Shift their centre of mass, causing their spherical bodies to roll.
- Walkers: Robots that move using legs with differential ground contact.
- Motor Driven: Use motors to move their legs (typically 3 motors or less).
- Muscle Wire Driven: Utilize Nitinol (nickel – titanium alloy) wires for their leg actuators.
- Swimmers: Robots that move on or below the surface of a liquid (typically water).
- Boatbots: Operate on the surface of a liquid.
- Subbots: Operate under the surface of a liquid.
- Fliers: Robots that move through the air for sustained periods.
- Helicopters: Use a powered rotor to provide both lift and propulsion.
- Planes: Use fixed or flapping wings to generate lift.
- Blimps: Use a neutrally-buoyant balloon for lift.
- Climbers: Robot that moves up or down a vertical surface, usually on a track such as a rope or wire.
I’d quite like to go cruising round youtube and find videos for each of these… but time, time…
 Robotic Wanking Machine
Robotic Wanking Machine Human Powered Helicopter
Human Powered Helicopter The Face Twitching Guy is Back
The Face Twitching Guy is Back 3D Printed Flappy Flying Thing
3D Printed Flappy Flying Thing Face Tracking Lamp
Face Tracking Lamp Pumpkin Tetris
Pumpkin Tetris 3D Printed Lego Blending
3D Printed Lego Blending Skittle Sorting Machine
Skittle Sorting Machine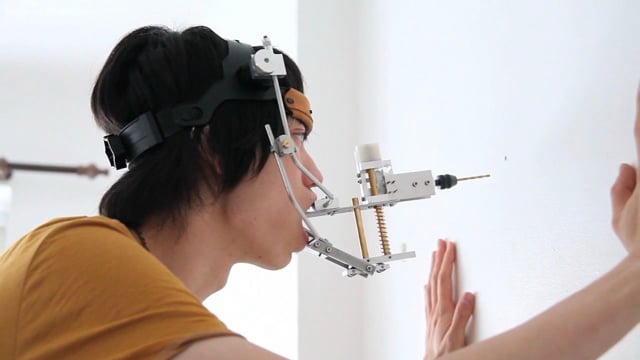 The Mouth Factory Guy
The Mouth Factory Guy Magnetic Wall Traversing Robot
Magnetic Wall Traversing Robot On Addiction
On Addiction And The Void Mooned Back...
And The Void Mooned Back... The Spirit Of The World
The Spirit Of The World A Machine to Steal Souls
A Machine to Steal Souls More Anti Digital
More Anti Digital Thync
Thync Robotic Sensory Loops and Whatnot
Robotic Sensory Loops and Whatnot Cartestian Robot Roundup.
Cartestian Robot Roundup. Post-Scarcity Link-Dump
Post-Scarcity Link-Dump Servo Bender
Servo Bender
[…] bunch of BEAM bots have turned up on […]