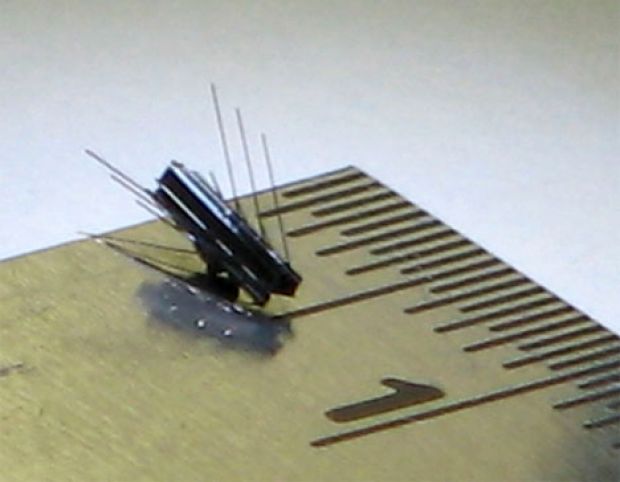
A bristlebot variant used for surgery.
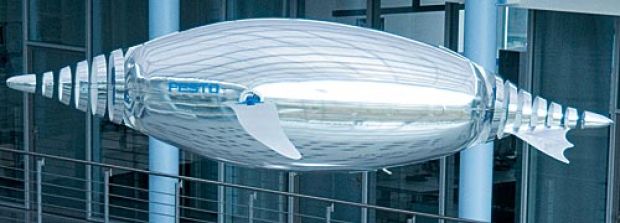
Squid-like robot.
A company using rats to play on the stock exchange
Stilts that have horses hooves.
Amazing penguin robots... and cool bionic hand
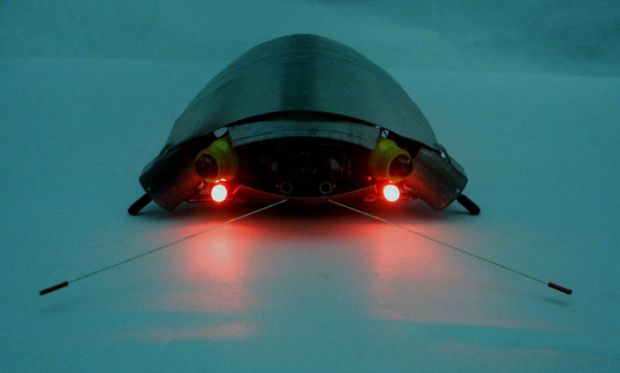
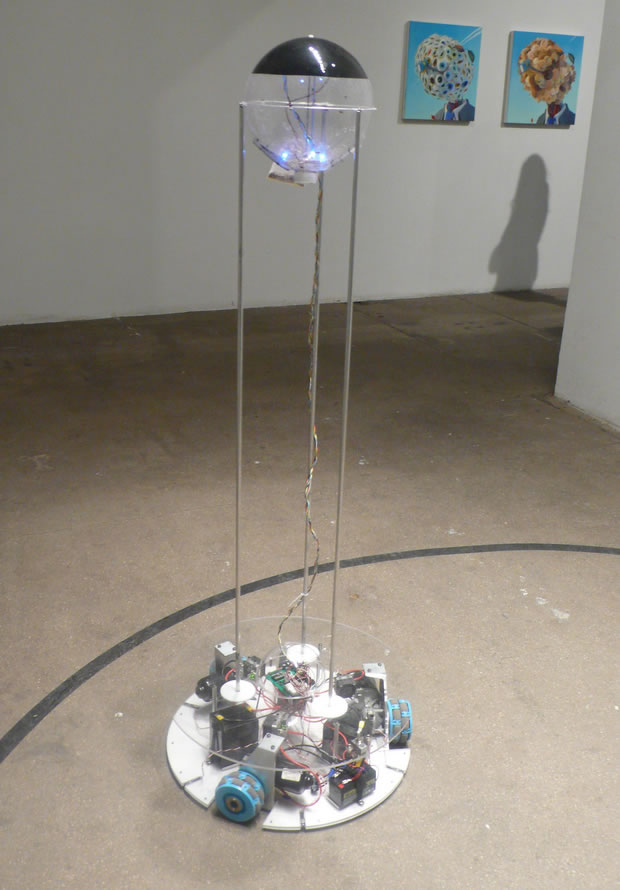
Beambots - hardwired analogue machine intelligence... on DIY scale
Theorising about really small 360 degree camera lenses
A collection of wall-climbing robots
Insect controlled robots and hamster balls